ROVR Releases Open Dataset To Power The Future Of Spatial AI, Robotics, And Autonomous Systems

Santa Clara, California, August 26th, 2025, Chainwire
At the ADAS & Autonomous Vehicle Technology Summit North America, ROVR, a leading decentralized physical infrastructure network (DePIN) building the foundation of Spatial AI, proudly announced the launch of the ROVR Open Dataset — a high-resolution, multi-modal dataset designed to accelerate innovation in Spatial AI, autonomous driving, robotics, and digital twin applications.
This release at one of the industry’s premier gatherings highlights ROVR’s commitment to supporting the autonomous vehicle ecosystem with open, high-fidelity data to fuel the next generation of intelligent mobility solutions.
The dataset marks a significant milestone in ROVR’s mission to democratize access to high-quality real-world data and unlock the next generation of AI models that understand and interact with physical space.
A Human-Centric View of the World
Unlike traditional datasets focused purely on machine vision, the ROVR Open Dataset captures the world as seen by human drivers — including what they see, how they move, and how they interact with their surroundings.
Collected using ROVR’s custom-built mobile perception units — operated by a global network of contributors — the dataset is part of a long-term effort to build the world’s largest open-access driving dataset, with a target of 1 million 30-second clips.
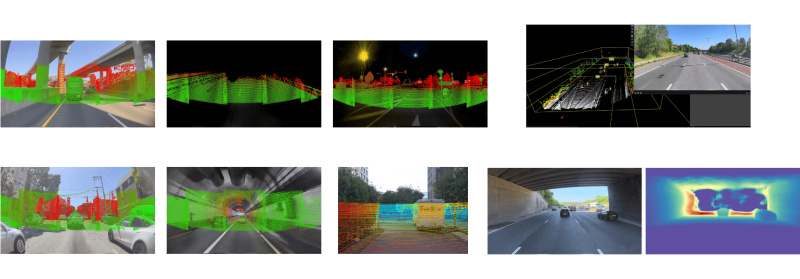
Each clip contains:
- Raw LiDAR point clouds for detailed 3D spatial reconstruction
- High-resolution RGB video from front-facing dashcams
- High-frequency IMU data capturing motion dynamics
- Centimeter-level RTK GPS localization for precise ground-truth positioning
- Anonymized scenes for privacy-preserving and ethical AI development
The initial open release includes 1,500 fully synchronized clips, totaling more than 1TB of data. These clips offer diverse coverage across urban, suburban, and highway environments — including construction zones, school crossings, traffic congestion, and dynamic pedestrian scenes.
Beyond raw sensor data, ROVR is also building a scalable annotation pipeline for semantic segmentation, object detection, scene understanding, and intent prediction — enabling researchers and engineers to train next-generation foundation models for Spatial AI.
Future versions of the dataset will include:
- Human-annotated 2D/3D bounding boxes, semantic labels, and behavior cues
- Scene graph generation to capture the spatial and temporal relationships between objects
- Action and intent labels for use in behavior modeling and policy learning
- Domain diversity metadata to support generalization across geographies and edge cases
These features are designed to support a wide range of cutting-edge applications, including:
- Autonomous driving and path planning
- Robot navigation and SLAM benchmarking
- AR/VR spatial awareness and occlusion reasoning
- Multi-modal large model (VLM, VLM+3D) pre-training
- Digital twin creation for smart cities and infrastructure
The ROVR Open Dataset enables researchers, developers, and institutions to train, benchmark, and deploy next-generation AI models that can operate safely and intelligently in the real world. By making the dataset openly available, ROVR aims to foster collaboration, reproducibility, and transparency across the global AI and robotics communities.
Why Now, And Why Open
The launch at the ADAS & AV Technology Summit North America comes at a time when perception and real-world understanding are emerging as the next great frontiers of AI development.
Over the past year, foundation models have revolutionized language and image understanding — but Spatial AI remains significantly underpowered, largely due to the scarcity of large-scale, high-quality real-world datasets.
Perception is rapidly emerging as the next frontier of AI. Understanding how humans navigate and interpret the physical world — in real time, across diverse environments — is essential for building robust, generalizable AI systems. Unlike static maps or synthetic environments, real-world multimodal data provides the richness, ambiguity, and complexity that AI needs to master in order to operate safely and intelligently.
The ROVR Open Dataset offers a new lens into human-scale navigation and environmental awareness, bridging the gap between simulation and street-level intelligence. By making this dataset openly available, ROVR aims to empower researchers, developers, and builders across the AI, robotics, and smart infrastructure ecosystems.
The dataset is released under a permissive license for non-commercial use, with future plans to provide extended versions — including full sequences and dense annotations — to commercial partners. This initiative reflects ROVR’s commitment to open infrastructure, collective intelligence, and the responsible development of real-world AI systems.
Built by the DePIN Community
ROVR is powered by a decentralized network of contributors — individuals and fleets equipped with ROVR’s plug-and-play data collection hardware. Unlike centralized data collection by big tech, ROVR’s model is:
- Scalable — thousands of contributors, growing daily
- Global — spanning cities, suburbs, and emerging markets
- Incentivized — contributors earn tokens for sharing verified data
- Composable — enabling integration with various AI, AR/VR, and robotics stacks
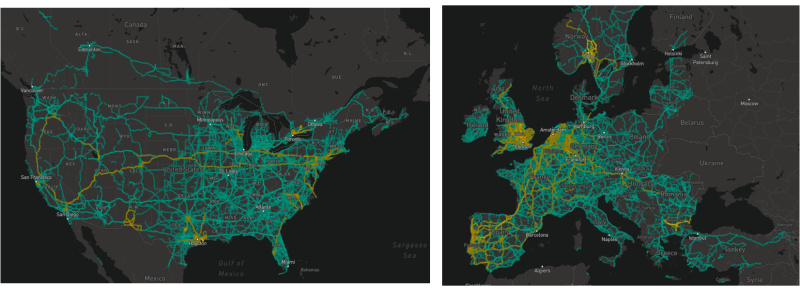
This community-first approach has already resulted in over 20 million kilometers of road coverage and more than 3500 devices deployed, with usage accelerating as demand for real-world 3D data grows.
 From Data to Deployment
From Data to Deployment
Beyond raw data, ROVR is building a full-stack pipeline for Spatial AI, including:
- On-device intelligence for efficient collection
- Cloud-based annotation tools for scalable labeling
- APIs and SDKs to integrate 3D world understanding into AI systems
- Partnerships with researchers, startups, and enterprises across sectors
The Open Dataset launch is the first step in building a shared foundation for all who are building the AI-native physical world — whether it’s self-driving cars, warehouse robots, AR glasses, or smart cities.
How to Access the Dataset
The ROVR Open Dataset is available today for download and exploration.
https://rovr.network/#/dataset
Researchers, developers, educators, and innovators are encouraged to join the ROVR ecosystem and help shape the future of Spatial AI.
About ROVR
ROVR is the cornerstone of Spatial AI — a decentralized network that transforms everyday vehicles into intelligent 3D mappers of the physical world. Through a global community of contributors, ROVR collects, structures, and distributes large-scale 3D data for use in AI, robotics, autonomous navigation, and beyond.
With a belief in open infrastructure, fair incentives, and global inclusion, ROVR is building the foundational layer for an intelligent, AI-first planet.
Media Contact: xinran.li@rovr.network
To learn more:

Contact
COO
Xinran Li
ROVR Labs Inc.
xinran.li@rovr.network
https://cryptodirectories.com/press-release/rovr-releases-open-dataset-to-power-the-future-of-spatial-ai-robotics-and-autonomous-systems/


